Control Interface Walkthrough#
Defining a Controllable Pipeline#
This section will walk through adding control to a basic DSP pipeline. The following code snippet describes a simple DSP process with a volume control and a limiter. In the end application the volume can be set by the application.
from audio_dsp.design.pipeline import Pipeline
from audio_dsp.stages import *
p, edge = Pipeline.begin(4)
edge = p.stage(VolumeControl, edge, "volume")
edge = p.stage(LimiterRMS, edge)
p.set_outputs(edge)
This code snippet will generate the pipeline diagram shown in Fig. 11.
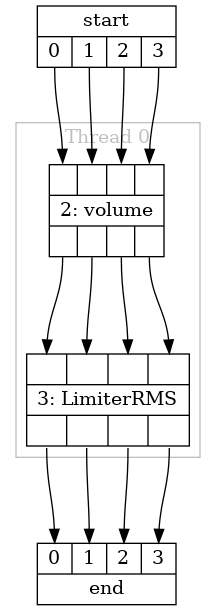
Fig. 11 The example pipeline diagram#
In this example the tuning methods on the stages in the pipeline are not called which means the code that is generated will intialise the stages with their default configuration values.
A point of interest in this example is that the label argument to the pipeline stage method is set, but only for the volume control stage. The label for the volume control in this example is “volume”. After generating the source code for this pipeline, a file will be created in the specified directory named “adsp_instance_id_auto.h” (assuming that the pipeline identifier has been left as its default value of “auto”). The contents of the generated file are shown below:
#pragma once
#define thread0_stage_index (1)
#define volume_stage_index (2)
#define auto_thread_stage_indices { thread0_stage_index }
In this file the macro volume_stage_index is defined. The value of this macro can be used by the control interface to find the volume control stage and process control commands. The benefit of this to an application author is that this header file can be included in the application and the value of volume_stage_index will always be correct, even when the pipeline is redesigned.
Writing the Configuration of a Stage#
Each stage type has a set of controllable parameters that can be read or written. A description of each parameter along with its type and name can be found in the DSP Stages section in the DSP components document. For volume control, there is a command named CMD_VOLUME_CONTROL_TARGET_GAIN that can be updated at run time to set the volume. This command is defined in the generated header file “cmds.h” which will be placed into the build directory at “src.autogen/common/cmds.h”. “cmds.h” contains all the command IDs for all the stage types that CMake found.
It is also possible to see the available control parameters, along with the values they will be set to, while designing the pipeline in Python. This can be done using the get_config method of the stage as shown below.
config = p["volume"].get_config()
print(config)
This will print this dictionary of parameters:
{'target_gain': 134217728, 'slew_shift': 7, 'mute_state': 0}
This dictionary does not contain CMD_VOLUME_CONTROL_TARGET_GAIN, but is does contain “target_gain”. The final command name is constructed as “CMD_{STAGE_TYPE}_{PARAMETER}” where stage type and parameter should be replaced with the correct values for each, capitalised. All stages of the same type (e.g. VolumeControl) will have the same set of parameters.
The format and type of the control parameters for each stage are chosen to optimise processing time on the DSP thread. For example, CMD_VOLUME_CONTROL_TARGET_GAIN is not a floating point value in decibels, but rather a linear fixed point value. For this example we can use the convenience function adsp_dB_to_gain() which is defined in dsp/signal_chain.h.
In order to send a control command, the API defined in stages/adsp_control.h is used. This API is documented in the Tool User Guide, in the Pipeline Design API section. Complete the following steps:
Create a thread that will be updating the DSP configuration. This thread must be on the same tile as the DSP.
Create a new adsp_controller_t from the adsp_pipeline_t that was initialised for the generated pipeline. If multiple threads will be attempting control, each thread must have a unique instance of adsp_controller_t to ensure thread safety.
Initialise a new adsp_stage_control_cmd_t, specifying the instance ID (volume_stage_index), the command ID (CMD_VOLUME_CONTROL_TARGET_GAIN), and payload length (sizeof(int32_t)).
Create the command payload; this will be an int32_t containing the computed gain. Update the command payload pointer to reference the payload.
Call adsp_write_module_config until it returns ADSP_CONTROL_SUCCESS. There may be in-progress write or read commands which have been issued but not completed when starting the new command. In this scenario the adsp_write_module_config will return ADSP_CONTROL_BUSY which means that the attempt to write had no effect and should be attempted again.
A full example of a control thread that does this is shown below.
#include <xcore/parallel.h>
#include "cmds.h"
#include "adsp_generated_auto.h"
#include "adsp_instance_id_auto.h"
#include "dsp/signal_chain.h"
#include "control/signal_chain.h"
#include "stages/adsp_control.h"
#include "stages/adsp_pipeline.h"
void control_thread(adsp_controller_t* control) {
// convert desired value to parameter type
float desired_vol_db = -6;
int32_t desired_vol_raw = adsp_dB_to_gain(desired_vol_db);
adsp_stage_control_cmd_t command = {
.instance_id = volume_stage_index,
.cmd_id = CMD_VOLUME_CONTROL_TARGET_GAIN,
.payload_len = sizeof(desired_vol_raw),
.payload = &desired_vol_raw
};
// try write until success
while(ADSP_CONTROL_SUCCESS != adsp_write_module_config(control, &command));
// DONE!
}
void audio_source_sink(adsp_pipeline_t* p) {
// sends and receives audio to the pipeline
}
void dsp_main(void) {
adsp_pipeline_t* dsp = adsp_auto_pipeline_init();
// created a controller instance for each thread.
adsp_controller_t control;
adsp_controller_init(&control, dsp);
PAR_FUNCS(
PFUNC(audio_source_sink, dsp),
PFUNC(control_thread, &control),
PFUNC(adsp_auto_pipeline_main, dsp)
);
}
Reading the Configuration of a Stage#
In some cases it makes sense to read back the configuration of the stage. Some stages have dynamic values that are updated as the audio is processed and can be read back to the control thread. Volume control is an example of this as it will smoothly adjust the gain towards CMD_VOLUME_CONTROL_TARGET_GAIN; the current value of the gain which is actually being applied can be read by reading from the parameter CMD_VOLUME_CONTROL_GAIN. The API for reading is largely the same as writing, except the control API will write to the payload buffer.
This code example shows how to read the current CMD_VOLUME_CONTROL_GAIN parameter from the “volume” stage that is created in the example above.
int32_t read_volume_gain(adsp_controller_t* control) {
int32_t gain_raw;
adsp_stage_control_cmd_t command = {
.instance_id = volume_stage_index,
.cmd_id = CMD_VOLUME_CONTROL_GAIN,
.payload_len = sizeof(gain_raw),
.payload = &gain_raw
};
// try write until success
while(ADSP_CONTROL_SUCCESS != adsp_read_module_config(control, &command));
return gain_raw;
}
Control Interface Details#
This section provides a brief overview of how the control interface works.
Each stage that is included in the generated DSP pipeline has its own state which it will maintain as it processes audio. It also has a structure that contains its configuration parameters. Finally, it has a control state variable which is used to communicate between the DSP and control threads. Threads that wish to read or write to the configuration of a stage use the control API that is discussed above.
For a write command, the controlling thread will check that a command is not ongoing by querying the control state of the stage. If the stage is not processing a control command then the control thread will update the configuration struct for the stage and write to the control state variable that new parameters are available. When the DSP thread next gets an opportunity the stage will see that the parameters have been updated and update its internal state to match. When this is complete the control state variable will be cleared.
For a read command the process is similar. The control thread requests a read by updating the control state variable. The stage will see this and update the configuration struct with the latest value and notify the control thread, via the control state variable, that it has completed the request.
The control API ensures thread safety through the use of the adsp_controller_t struct. As long as each thread uses a unique instance of adsp_controller_t then the control APIs will return ADSP_CONTROL_BUSY if a command that was initialised by another adsp_controller_t is ongoing.